What is Locobotics?
Locobotics is a team originating from Professor Monroe Kennedys III's Collaborative Robotics course at Stanford University. This website details the works towards implementing a collaborative strategy that can be used for resource gathering tasks involving robot-robot collaboration without the use of digital communication between robots. In theory, robots that are capable of collaborating without direct communication should be applicable to human-robot collaboration.
Objective:
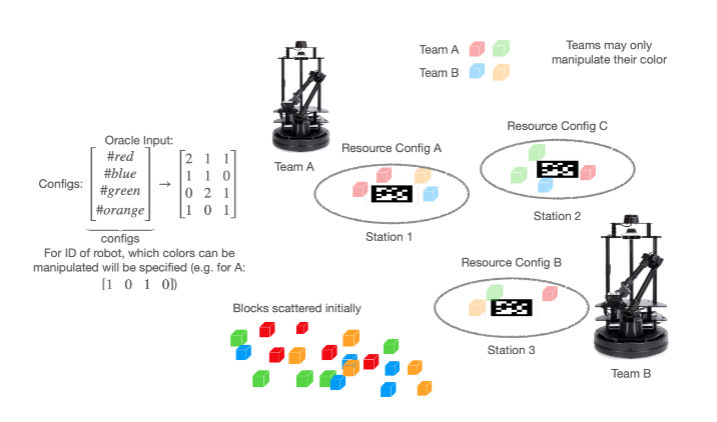
The goal of this project is for two robots to achieve fluent collaboration for a resource gathering task without direct electronic or digital communication. The task consists of gathering four different colored blocks into three resource stations organized according to a given configuration file. The difficulty in this challenge stems from the fact that four resources stations exist and none of them are defined which requires the robots to define each station without standard modes of communication. The task complexity is increased by the constraint that each robot can only manipulate two block colors with the assumption that there is no overlap between color assignments. The motivation for this project is to develop a collaborative strategy that can be applied to human robot collaboration. If two robots can successfully accomplish a task without digital communication so should a human and robot.