Motion
The robot's base is subject to a non-holonomic constraint. For this reason, to control the base, a point P is defined in the forward direction of the base at a distance L. Provided L is greater than zero, point P is no longer subject to the non-holonomic constraint and a simple proportional controller can be used.
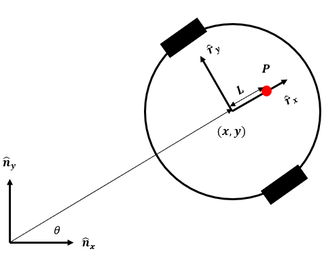
Figure 1. Robot's base frame definition
The robot has to be able to move through the workspace while avoiding collisions with the resources, otherwise it could affect the estimated location of the resources for both robots, and collisions with the other robot. To achieve this we propose to use a Reciprocal Velocity Obstacle collision avoidance algorithm [1].
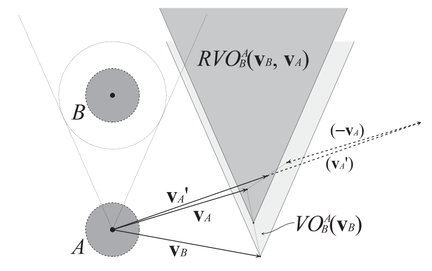
Figure 2. Graphical representation of Velocity Obstacle (VO) and Reciprocal Velocity Obstacle (RVO) [1]
References
- Van den Berg, J., Ming L. & Manocha, D., Reciprocal Velocity Obstacles for real-time multi-agent navigation, IEEE International Conference on Robotics and Automation, DOI:10.1109/ROBOT.2008.4543489, 2008.
